Nerfbusters#
Removing Ghostly Artifacts from Casually Captured NeRFs 👻
TLDR: We present a method that uses a 3D diffusion prior to clean NeRFs and an evaluation procedure for in-the-wild NeRFs
Installation#
First install nerfstudio dependencies. Then run:
pip install git+https://github.com/ethanweber/nerfbusters
nerfbusters-setup
ns-train nerfbusters --help
For more details, see the installation instructions.
Running the Method#
Please checkout the readme for the Nerfbusters repository
Abstract#
Casually captured Neural Radiance Fields (NeRFs) suffer from artifacts such as floaters or flawed geometry when rendered outside the path of the training views. However, common practice is still to evaluate on every 8th frame, which does not measure rendering quality away from training views, hindering progress in volume rendering. We propose a new dataset and evaluation procedure, where two camera trajectories are recorded of the scene, one used for training, and the other for evaluation. We find that existing hand-crafted regularizers do not remove floaters nor improve scene geometry in this more challenging in-the-wild setting. To this end, we propose a learned, local 3D diffusion prior and a novel density score distillation sampling loss. We show that this learned prior removes floaters and improves scene geometry for casual captures.
NeRF evaluation for casually captured videos#
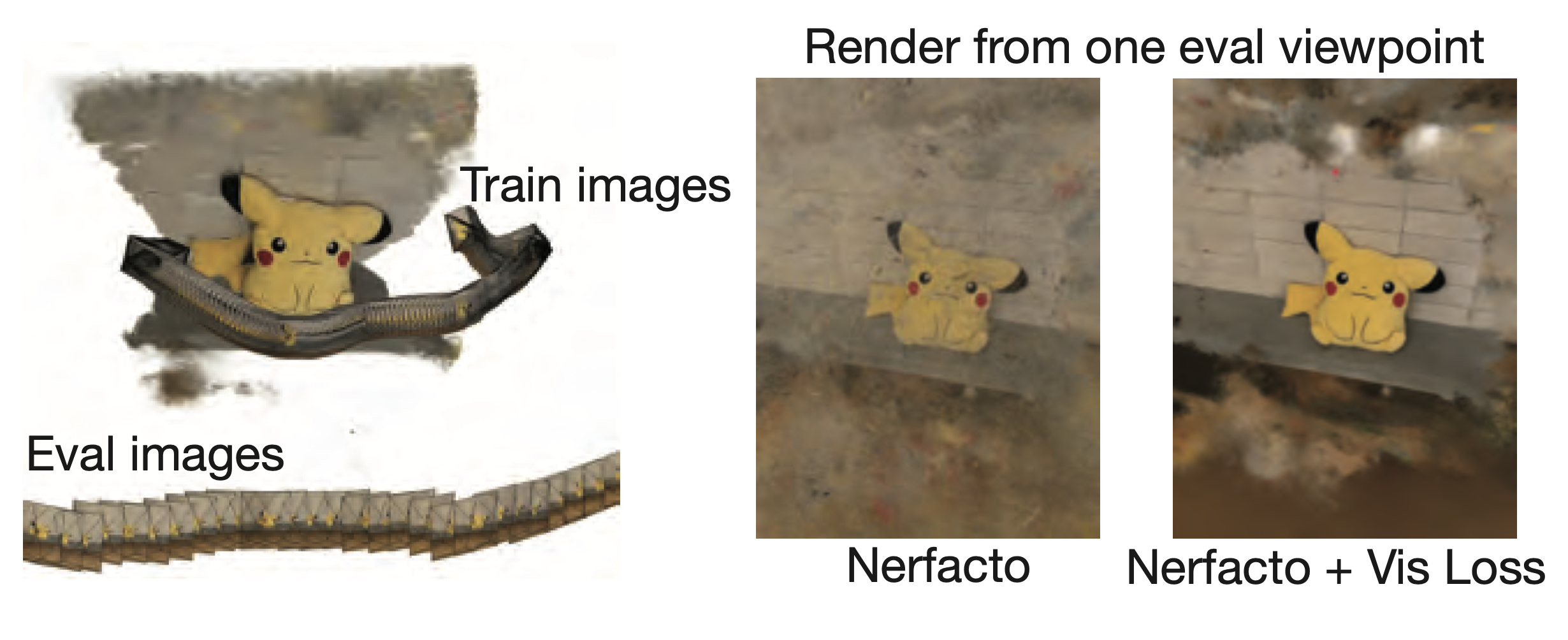
We train on a single camera trajectory and evaluate on a second camera trajectory. Both methods succeed on the training trajectory, but only our method succeeds on the evaluation trajectory.
Model Overview#
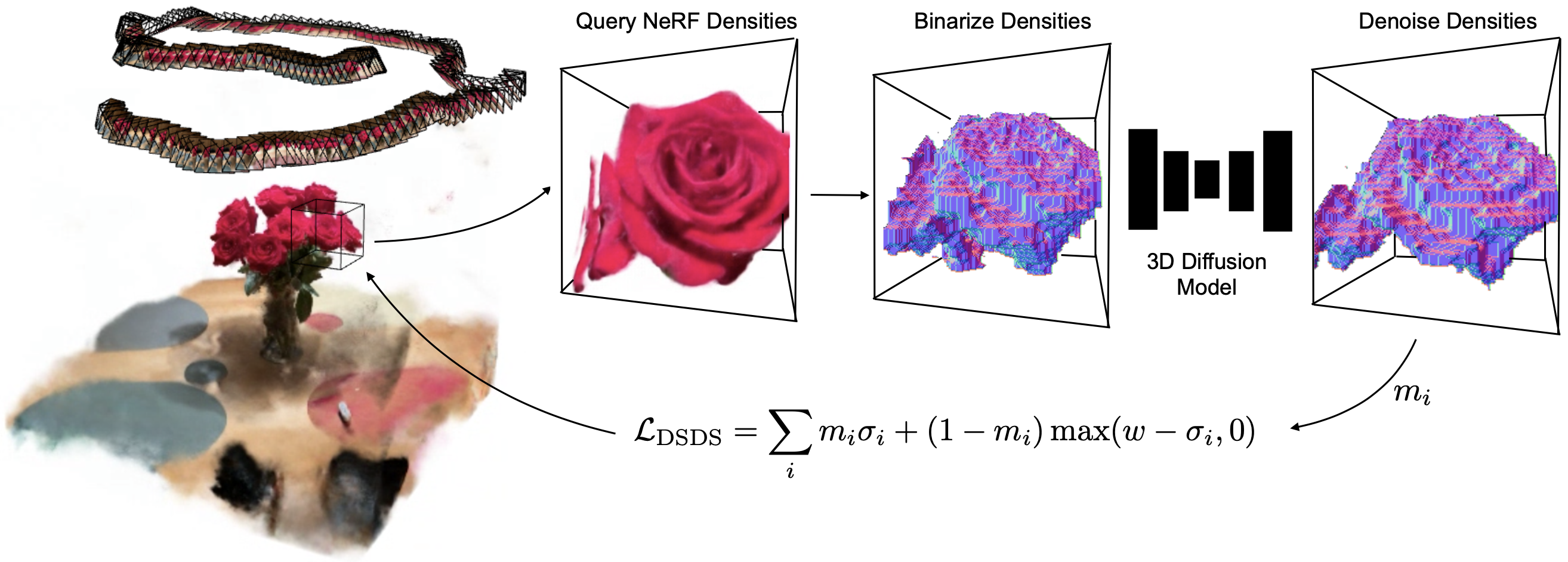
We learn a local 3D prior with a diffusion model that regularizes the 3D geometry of NeRFs. We use importance sampling to query a cube with NeRF densities. We binarize these densities and perform one single denoising step using a pre-trained 3D diffusion model. With these denoised densities, we compute a density score distillation sampling (DSDS) that penalizes NeRF densities where the diffusion model predicts empty voxels and pushes the NeRF densities above the target w where the diffusion model predicts occupied voxels.
Visibiltiy Loss#
Our visibility loss enables stepping behind or outside the training camera frustums. We accomplish this by supervising densities to be low when not seen by at least one training view. Other solutions would be to store an occupancy grid or compute ray-frustum intersection tests during rendering. Our solution is easy to implement and applicable to any NeRF.
Results and dataset preview#
For results and a dataset preview, view the project page!